At present, Indian manufacturers are importing robots at a much higher cost that in turn makes the shop-floor automation financially impractical. There is a huge potential to develop machine tending robots indigenously at a much lower price for the benefit of ‘machine loading automation’ in sectors like manufacturing, nuclear, defence, medical, training and education sector as FMSI CIM System.
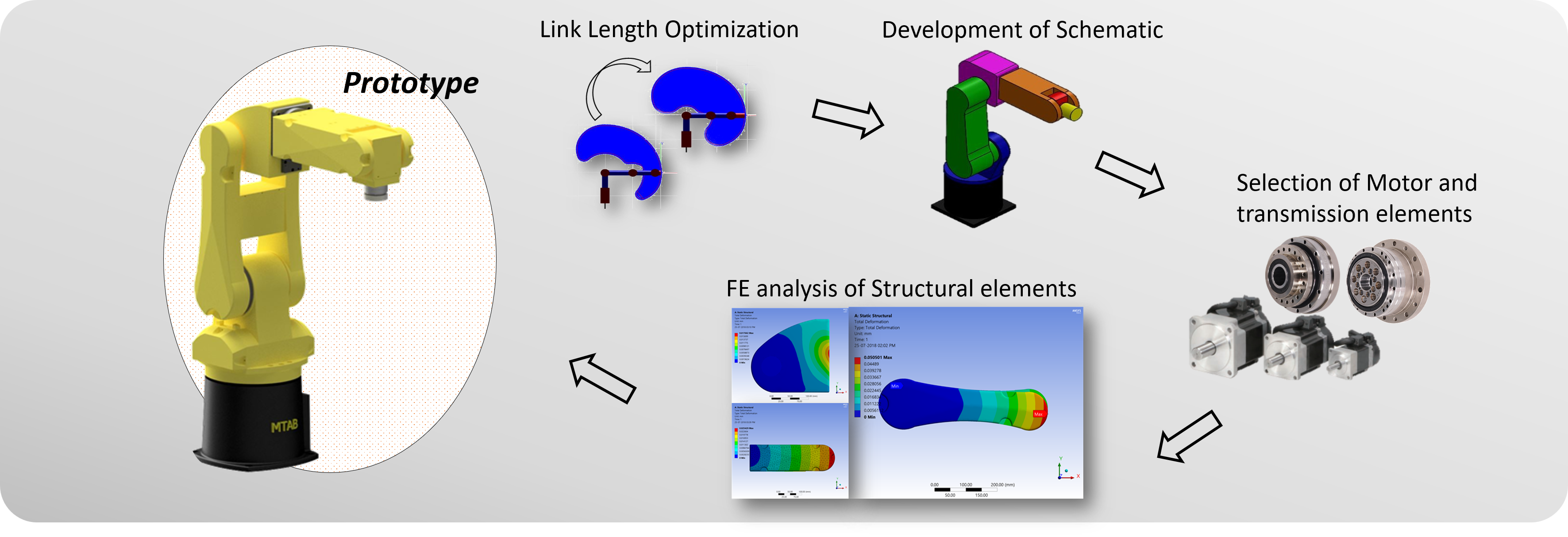
Articulated robot use three revolute joints for positioning and three for orientation of the end-effector. Usually, the joints are arranged in a “chain”, so that one supports another further in the Chain. The entire manipulative joints can be controlled with a coordinated motion using a multi-axis controller in which robot kinematics are inbuilt. Currently two robots are being built, one with 6kg payload and other with 10kg payload capacity.